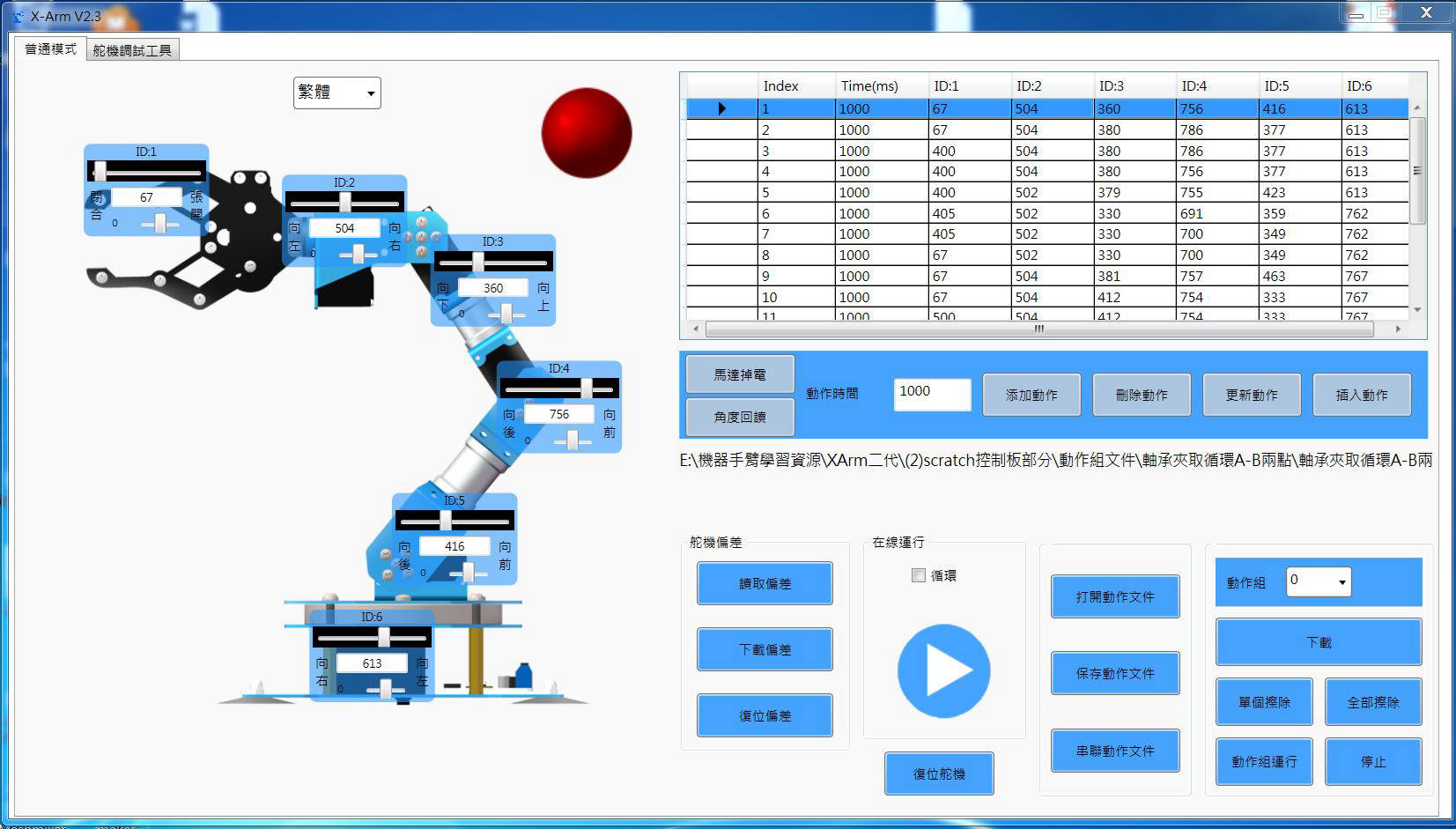
軸承抓取定位程式
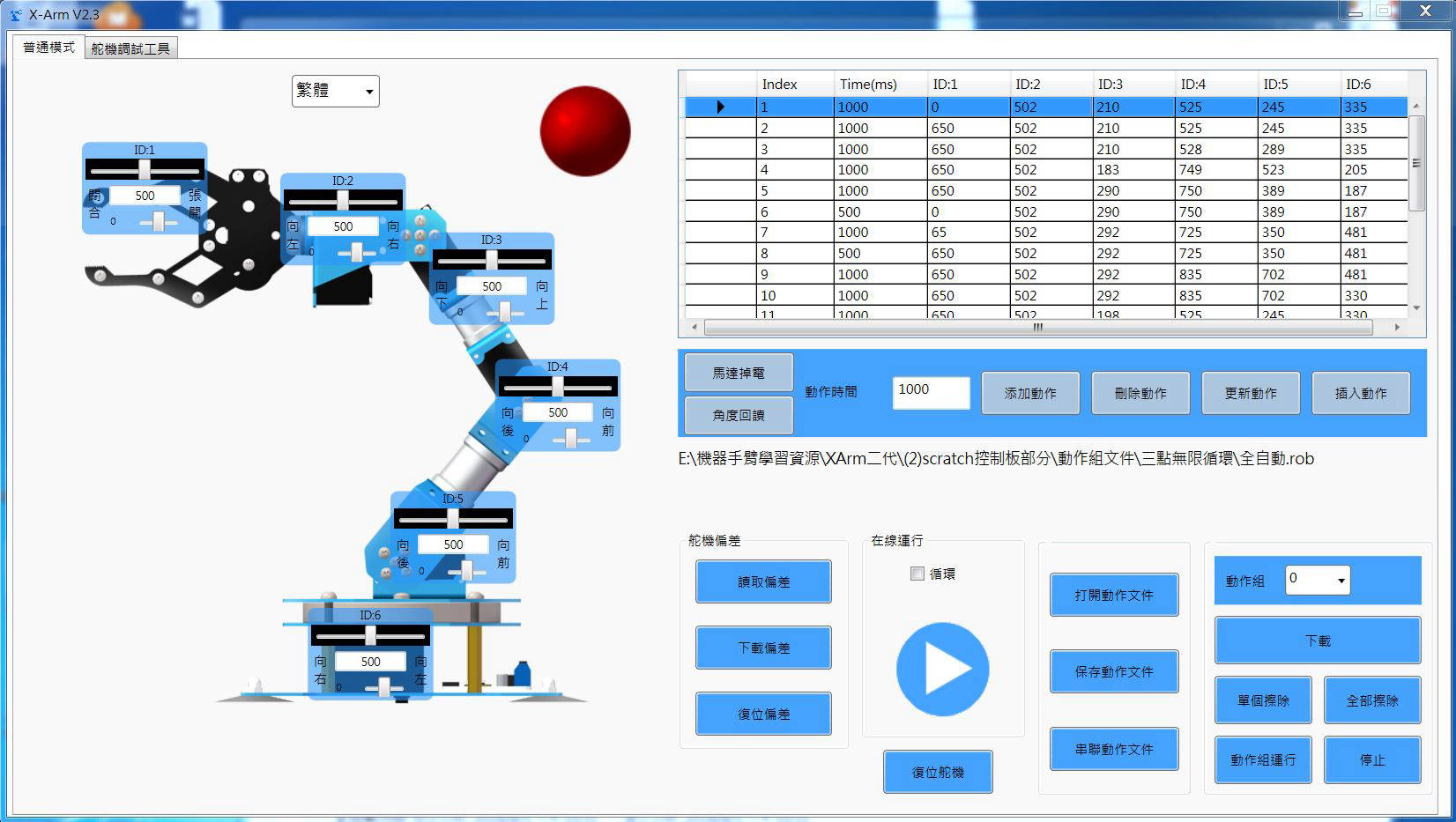
三點定位抓取程式
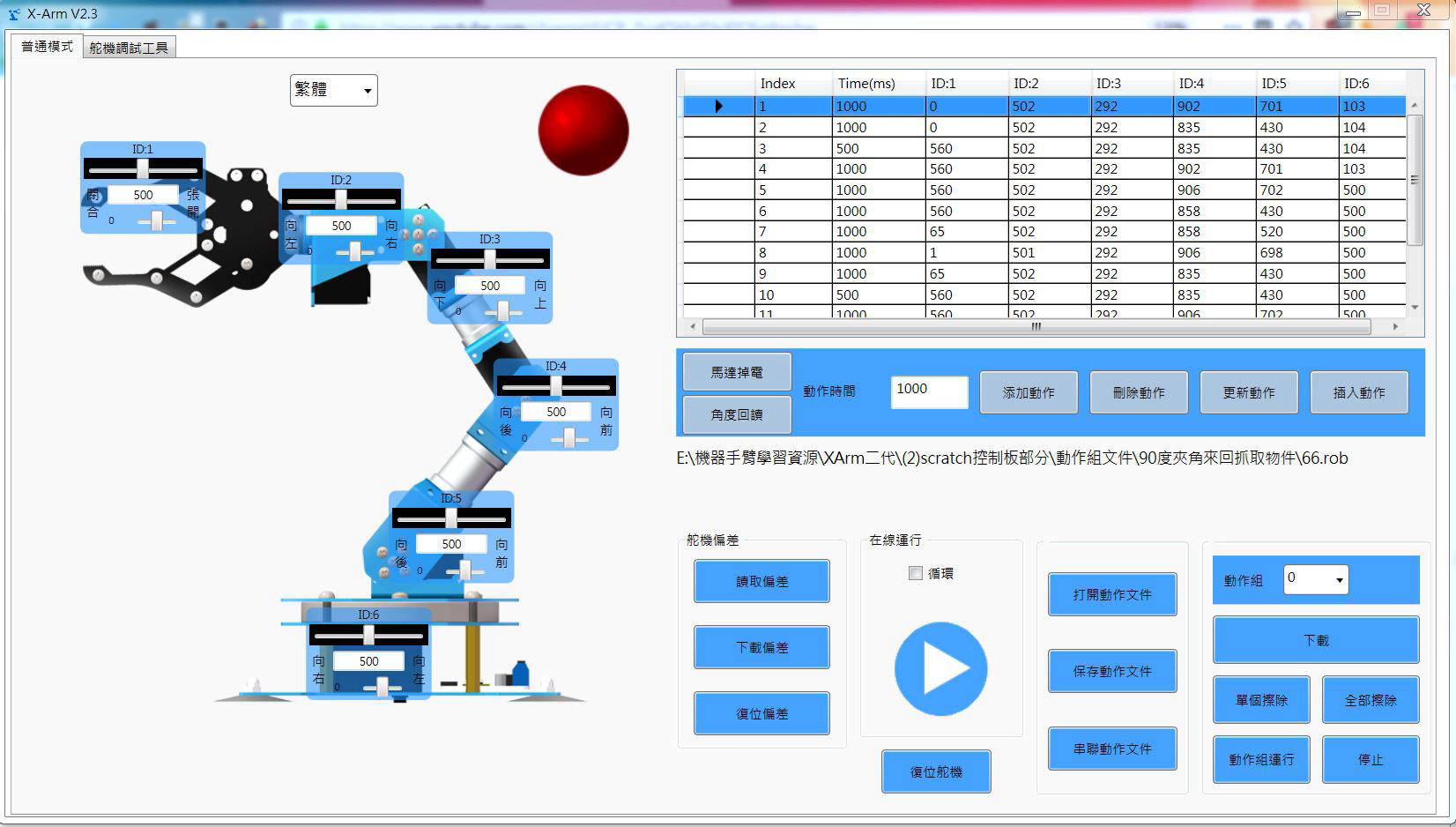
90度往復抓取程式
機械手臂程式設計流程
1.找出目標物的角度(調整ID6)2.馬達掉電,移動手臂至適當位置3.點擊角度回讀(讀出約略的數值)4.在線運行,觀看手臂移動位置5.進行ID4與ID5的微調6.循環上述1~5步驟,直到完成程式的建立
公司地址 830台灣高雄市鳳山區南京路245巷14號聯絡我們 email: blackliu@ms15.hinet.net 電話 : 07-766-5562 傳真 : 07-766-3294
網頁連結 聯欣發首頁聯欣發創客科技 客戶服務 歡迎撥打本公司電話洽詢機械手臂